Zhenzhen Xiang
Ph. D. Candidate of Robotics
Shanghai Jiao Tong University
Biography
My name is Zhenzhen Xiang (项祯桢). I am currently a Ph. D. student at the School of Electronic Information and Electrical Engineering, Shanghai Jiao Tong University, China, working with Prof. Jianbo Su on Semantic Scene Understanding and Semantic SLAM for Mobile Robots.
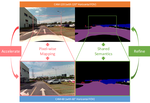
My research interests mainly include : multi-view geometry, semantic segmentation, visual odometry, SLAM, autonomous navigation, autonomous vehicles. Currently, I am focusing on approaches of sharing semantics between multiple cameras, especially their applications in visual navigation for autonomous driving.
Interests
- Visual Semantics Perception
- Visual Odometry and SLAM
- Visual Navigation
- LiDAR Odometry and SLAM
- Autonomous Vehicles
- Mobile Robots
Education
Ph. D. Candidate in Control Science and Engineering, now
Shanghai Jiao Tong University
M.Sc. in Control Science and Engineering, 2016
Shanghai Jiao Tong University
B.Sc. in Automation, 2013
Shanghai Jiao Tong University