Towards Customizable Robotic Disinfection with Structure-Aware Semantic Mapping
Abstract
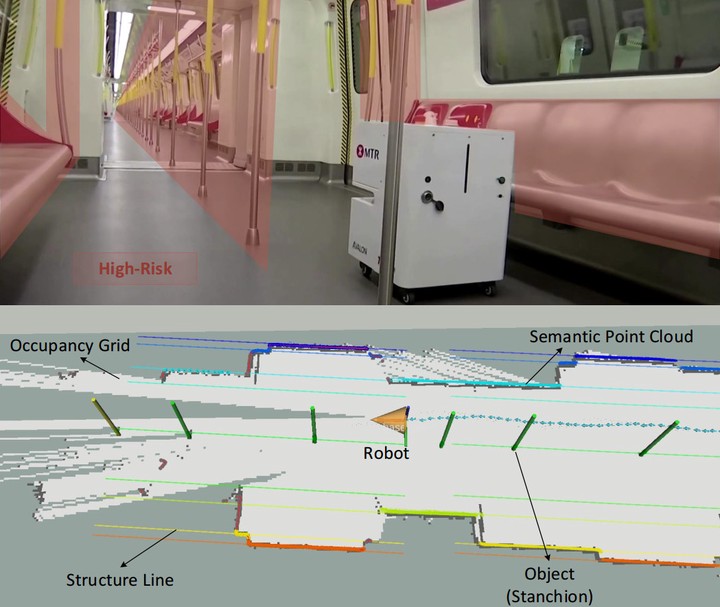
In the current COVID-19 pandemic, people expect to use robots to replace humans to complete the disinfection work in public places. Since different regions in the environment have different risks, in addition to the conventional SLAM capability, the robot also needs to be able to recognize and distinguish different objects in the scene to complete customizable disinfection tasks. In this paper, we propose a LiDAR-based semantic mapping system that can be used for robotic disinfection tasks. By using the prior information about the scene structure, our system can extract different levels of semantic information from the raw point cloud, so as to not only construct an occupancy grid map for navigation, but also construct a hierarchical semantic map that meets the needs of customizable disinfection tasks, including setting the navigation waypoints, disinfection distances and disinfection time. The effectiveness of our proposed system is proved in the real-world metro disinfection applications.