Introduction
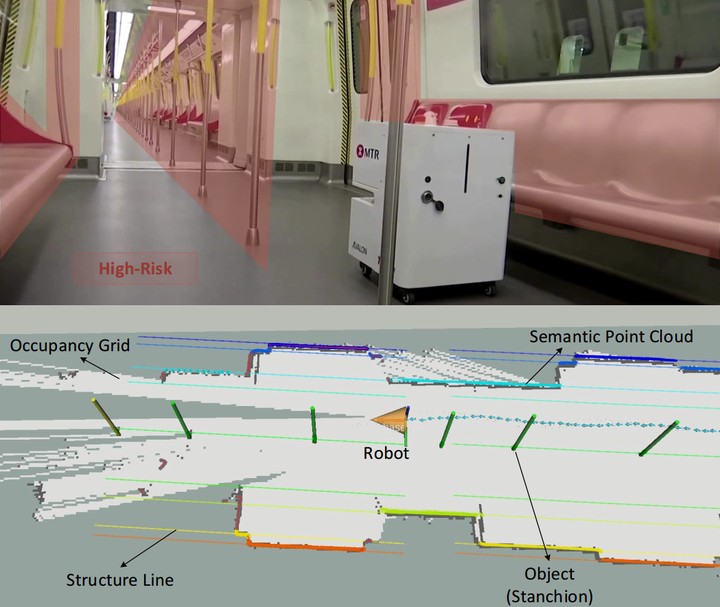
In this project, we developed a robot which can autonomously navigate in metro cars for customizable disinfection tasks. Compared with traditional navigation systems, our system can identify different objects and structures of the metro car, thus the disinfection path, distance and time for different objects can be customized.
Robots

System Architecture

Results
Videos are available on Youtube!
- Structure-aware Data Association

- Object Detection

- Local Map Update

- Stanchion State Update

- Semantic Mapping

